OPENCV没有提供完整的示例,自己整理了一下,贴出来记录。
步骤如下:
首先自制一张标定图片,用A4纸打印出来,设定距离,再设定标定棋盘的格子数目,如8×6,以下是我做的图片8×8
然后利用cvFindChessboardCorners找到棋盘在摄像头中的2D位置,这里cvFindChessboardCorners不太稳定,有时不能工作,也许需要图像增强处理。
计算实际的距离,应该是3D的距离。我设定为21.6毫米,既在A4纸上为两厘米。
再用cvCalibrateCamera2计算内参,
最后用cvUndistort2纠正图像的变形。
结果如下: 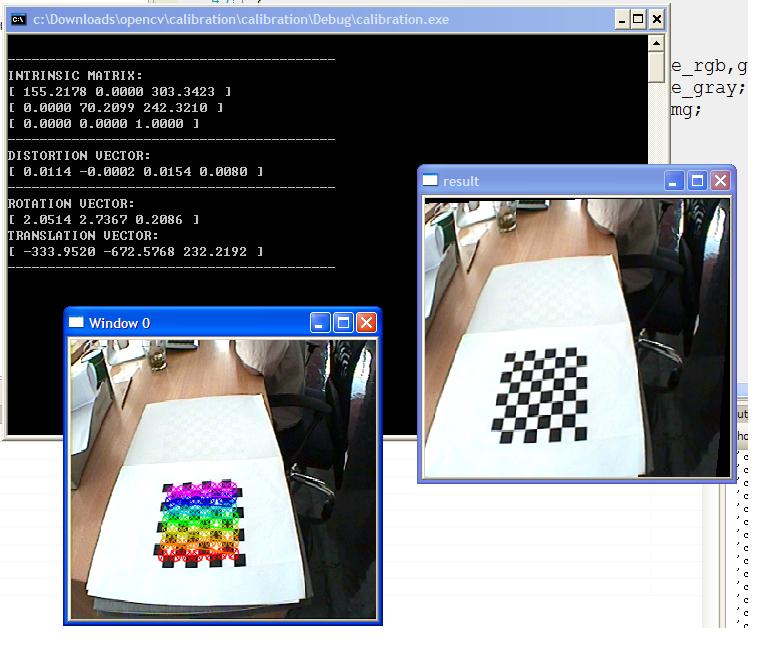
代码: <c>#include "stdafx.h"
- include <stdio.h>
- include <stdlib.h>
- include <string.h>
// OpenCV
- include <cxcore.h>
- include <cv.h>
- include <highgui.h>
- include <cvaux.h>
CvPoint2D32f* corners, int* corner_count=NULL, int flags=CV_CALIB_CB_ADAPTIVE_THRESH );inline int drawCorssMark(IplImage *dst,CvPoint pt) /*************************************************
Function: main_loop Description: 绘制一个十字标记 Calls: Called By: Input: RGB image, pt Output: Return: Others: 需要检查坐标是否越界 to do list
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
- /
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
{
const int cross_len = 4; CvPoint pt1,pt2,pt3,pt4; pt1.x = pt.x; pt1.y = pt.y - cross_len; pt2.x = pt.x; pt2.y = pt.y + cross_len; pt3.x = pt.x - cross_len; pt3.y = pt.y; pt4.x = pt.x + cross_len; pt4.y = pt.y;
cvLine(dst,pt1,pt2,CV_RGB(0,255,0),2,CV_AA, 0 ); cvLine(dst,pt3,pt4,CV_RGB(0,255,0),2,CV_AA, 0 );
return 0; }
/* declarations for OpenCV */ IplImage *current_frame_rgb,grid; IplImage *current_frame_gray; IplImage *chessBoard_Img;
int Thresholdness = 120;
int image_width = 320; int image_height = 240;
bool verbose = false;
const int ChessBoardSize_w = 7; const int ChessBoardSize_h = 7; // Calibration stuff bool calibration_done = false; const CvSize ChessBoardSize = cvSize(ChessBoardSize_w,ChessBoardSize_h); //float SquareWidth = 21.6f; //实际距离 毫米单位 在A4纸上为两厘米 float SquareWidth = 17; //投影实际距离 毫米单位 200
const int NPoints = ChessBoardSize_w*ChessBoardSize_h; const int NImages = 20; //Number of images to collect
CvPoint2D32f corners[NPoints*NImages]; int corner_count[NImages] = {0}; int captured_frames = 0;
CvMat *intrinsics; CvMat *distortion_coeff; CvMat *rotation_vectors; CvMat *translation_vectors; CvMat *object_points; CvMat *point_counts; CvMat *image_points; int find_corners_result =0 ;
void on_mouse( int event, int x, int y, int flags, void* param ) {if( event == CV_EVENT_LBUTTONDOWN ) { //calibration_done = true;
}
}
int main(int argc, char *argv[]) {
CvFont font; cvInitFont( &font, CV_FONT_VECTOR0,5, 5, 0, 7, 8); intrinsics = cvCreateMat(3,3,CV_32FC1); distortion_coeff = cvCreateMat(1,4,CV_32FC1); rotation_vectors = cvCreateMat(NImages,3,CV_32FC1); translation_vectors = cvCreateMat(NImages,3,CV_32FC1);
point_counts = cvCreateMat(NImages,1,CV_32SC1);
object_points = cvCreateMat(NImages*NPoints,3,CV_32FC1); image_points = cvCreateMat(NImages*NPoints,2,CV_32FC1);
// Function to fill in the real-world points of the checkerboard InitCorners3D(object_points, ChessBoardSize, NImages, SquareWidth);
CvCapture* capture = 0;
if( argc == 1 || (argc == 2 && strlen(argv[1]) == 1 && isdigit(argv[1][0])))
capture = cvCaptureFromCAM( argc == 2 ? argv[1][0] - '0' : 0 );
else if( argc == 2 )
capture = cvCaptureFromAVI( argv[1] );
if( !capture ) { fprintf(stderr,"Could not initialize capturing...\n"); return -1;
} // Initialize all of the IplImage structures current_frame_rgb = cvCreateImage(cvSize(image_width, image_height), IPL_DEPTH_8U, 3); IplImage *current_frame_rgb2 = cvCreateImage(cvSize(image_width, image_height), IPL_DEPTH_8U, 3); current_frame_gray = cvCreateImage(cvSize(image_width, image_height), IPL_DEPTH_8U, 1);
chessBoard_Img = cvCreateImage(cvSize(image_width, image_height), IPL_DEPTH_8U, 3); current_frame_rgb2->origin = chessBoard_Img->origin = current_frame_gray->origin = current_frame_rgb->origin = 1; makeChessBoard();
cvNamedWindow( "result", 0); cvNamedWindow( "Window 0", 0); cvNamedWindow( "grid", 0); cvMoveWindow( "grid", 100,100); cvSetMouseCallback( "Window 0", on_mouse, 0 ); cvCreateTrackbar("Thresholdness","Window 0",&Thresholdness, 255,0); while (!calibration_done) { while (captured_frames < NImages)
{ current_frame_rgb = cvQueryFrame( capture ); //current_frame_rgb = cvLoadImage( "c:\\BoardStereoL3.jpg" ); //cvCopy(chessBoard_Img,current_frame_rgb);
if( !current_frame_rgb ) break;
cvCopy(current_frame_rgb,current_frame_rgb2); cvCvtColor(current_frame_rgb, current_frame_gray, CV_BGR2GRAY); //cvThreshold(current_frame_gray,current_frame_gray,Thresholdness,255,CV_THRESH_BINARY); //cvThreshold(current_frame_gray,current_frame_gray,150,255,CV_THRESH_BINARY_INV);
/* int pos = 1; IplConvKernel* element = 0; const int element_shape = CV_SHAPE_ELLIPSE; element = cvCreateStructuringElementEx( pos*2+1, pos*2+1, pos, pos, element_shape, 0 ); cvDilate(current_frame_gray,current_frame_gray,element,1); cvErode(current_frame_gray,current_frame_gray,element,1); cvReleaseStructuringElement(&element);
- /
find_corners_result = cvFindChessboardCorners(current_frame_gray,
ChessBoardSize, &corners[captured_frames*NPoints], &corner_count[captured_frames], 0);
cvDrawChessboardCorners(current_frame_rgb2, ChessBoardSize, &corners[captured_frames*NPoints], NPoints, find_corners_result);
cvShowImage("Window 0",current_frame_rgb2); cvShowImage("grid",chessBoard_Img);if(find_corners_result==1) { cvWaitKey(2000); cvSaveImage("c:\\hardyinCV.jpg",current_frame_rgb2); captured_frames++; } //cvShowImage("result",current_frame_gray);
intrinsics->data.fl[0] = 256.8093262; //fx intrinsics->data.fl[2] = 160.2826538; //cx intrinsics->data.fl[4] = 254.7511139; //fy intrinsics->data.fl[5] = 127.6264572; //cy
intrinsics->data.fl[1] = 0; intrinsics->data.fl[3] = 0; intrinsics->data.fl[6] = 0; intrinsics->data.fl[7] = 0; intrinsics->data.fl[8] = 1;
distortion_coeff->data.fl[0] = -0.193740; //k1 distortion_coeff->data.fl[1] = -0.378588; //k2 distortion_coeff->data.fl[2] = 0.028980; //p1 distortion_coeff->data.fl[3] = 0.008136; //p2
cvWaitKey(40); find_corners_result = 0;
}
//if (find_corners_result !=0) {
printf("\n");
cvSetData( image_points, corners, sizeof(CvPoint2D32f)); cvSetData( point_counts, &corner_count, sizeof(int));
cvCalibrateCamera2( object_points, image_points, point_counts, cvSize(image_width,image_height), intrinsics, distortion_coeff, rotation_vectors, translation_vectors, 0); // [fx 0 cx; 0 fy cy; 0 0 1]. cvUndistort2(current_frame_rgb,current_frame_rgb,intrinsics,distortion_coeff); cvShowImage("result",current_frame_rgb); float intr[3][3] = {0.0}; float dist[4] = {0.0}; float tranv[3] = {0.0}; float rotv[3] = {0.0};for ( int i = 0; i < 3; i++) { for ( int j = 0; j < 3; j++) { intr[i][j] = ((float*)(intrinsics->data.ptr + intrinsics->step*i))[j]; } dist[i] = ((float*)(distortion_coeff->data.ptr))[i]; tranv[i] = ((float*)(translation_vectors->data.ptr))[i]; rotv[i] = ((float*)(rotation_vectors->data.ptr))[i]; } dist[3] = ((float*)(distortion_coeff->data.ptr))[3];
printf("-----------------------------------------\n"); printf("INTRINSIC MATRIX: \n"); printf("[ %6.4f %6.4f %6.4f ] \n", intr[0][0], intr[0][1], intr[0][2]); printf("[ %6.4f %6.4f %6.4f ] \n", intr[1][0], intr[1][1], intr[1][2]); printf("[ %6.4f %6.4f %6.4f ] \n", intr[2][0], intr[2][1], intr[2][2]); printf("-----------------------------------------\n"); printf("DISTORTION VECTOR: \n"); printf("[ %6.4f %6.4f %6.4f %6.4f ] \n", dist[0], dist[1], dist[2], dist[3]); printf("-----------------------------------------\n"); printf("ROTATION VECTOR: \n"); printf("[ %6.4f %6.4f %6.4f ] \n", rotv[0], rotv[1], rotv[2]); printf("TRANSLATION VECTOR: \n"); printf("[ %6.4f %6.4f %6.4f ] \n", tranv[0], tranv[1], tranv[2]); printf("-----------------------------------------\n");
cvWaitKey(0);
calibration_done = true; }
}
exit(0); cvDestroyAllWindows();
}
void InitCorners3D(CvMat *Corners3D, CvSize ChessBoardSize, int NImages, float SquareSize) {
int CurrentImage = 0; int CurrentRow = 0; int CurrentColumn = 0; int NPoints = ChessBoardSize.height*ChessBoardSize.width; float * temppoints = new float[NImages*NPoints*3];
// for now, assuming we're row-scanning for (CurrentImage = 0 ; CurrentImage < NImages ; CurrentImage++) { for (CurrentRow = 0; CurrentRow < ChessBoardSize.height; CurrentRow++) { for (CurrentColumn = 0; CurrentColumn < ChessBoardSize.width; CurrentColumn++) { temppoints[(CurrentImage*NPoints*3)+(CurrentRow*ChessBoardSize.width + CurrentColumn)*3]=(float)CurrentRow*SquareSize; temppoints[(CurrentImage*NPoints*3)+(CurrentRow*ChessBoardSize.width + CurrentColumn)*3+1]=(float)CurrentColumn*SquareSize; temppoints[(CurrentImage*NPoints*3)+(CurrentRow*ChessBoardSize.width + CurrentColumn)*3+2]=0.f;
} } } (*Corners3D) = cvMat(NImages*NPoints,3,CV_32FC1, temppoints);
}
int myFindChessboardCorners( const void* image, CvSize pattern_size,
CvPoint2D32f* corners, int* corner_count, int flags )
{
IplImage* eig = cvCreateImage( cvGetSize(image), 32, 1 ); IplImage* temp = cvCreateImage( cvGetSize(image), 32, 1 ); double quality = 0.01; double min_distance = 5; int win_size =10;int count = pattern_size.width * pattern_size.height; cvGoodFeaturesToTrack( image, eig, temp, corners, &count, quality, min_distance, 0, 3, 0, 0.04 ); cvFindCornerSubPix( image, corners, count, cvSize(win_size,win_size), cvSize(-1,-1), cvTermCriteria(CV_TERMCRIT_ITER|CV_TERMCRIT_EPS,20,0.03));
cvReleaseImage( &eig ); cvReleaseImage( &temp );
return 1; }
void makeChessBoard() {
CvScalar e; e.val[0] =255; e.val[1] =255; e.val[2] =255; cvSet(chessBoard_Img,e,0); for(int i = 0;i
for(int j = 0;j<ChessBoardSize.height+1;j++) { int w =(image_width)/2/(ChessBoardSize.width); int h = w; //(image_height)/2/(ChessBoardSize.height);
int ii = i+1; int iii = ii+1; int jj =j+1; int jjj =jj+1; int s_x = image_width/6;
if((i+j)%2==1) cvRectangle( chessBoard_Img, cvPoint(w*i+s_x,h*j+s_x),cvPoint(w*ii-1+s_x,h*jj-1+s_x), CV_RGB(0,0,0),CV_FILLED, 8, 0 ); } } </c>